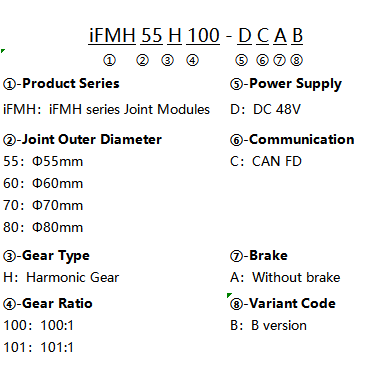
iFMH Series Joint Modules
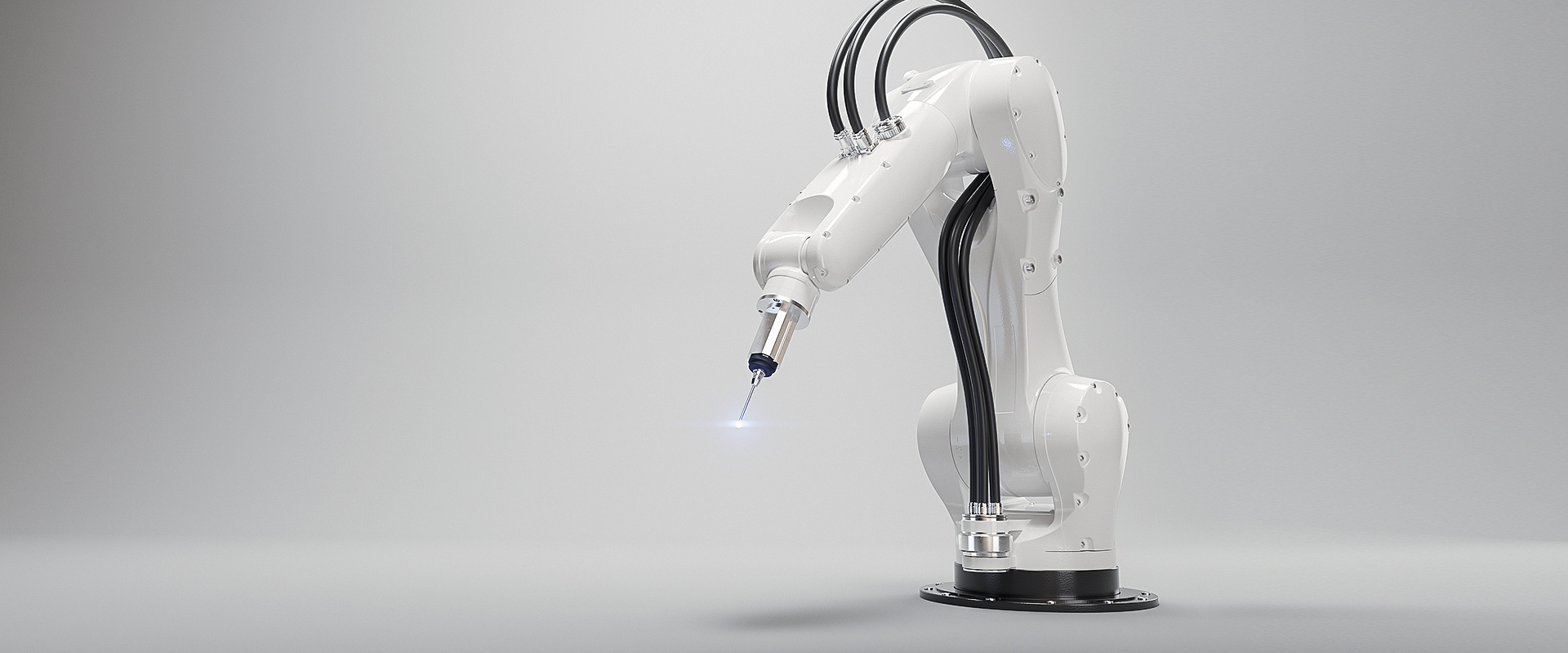
A humanoid robot rotary joint module integrates motor, gearbox, sensors, and drive electronics, acting as the robot's "muscles and bones."
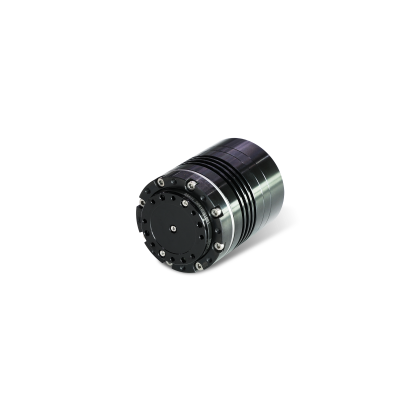
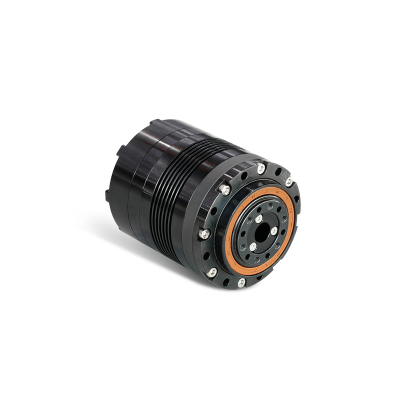
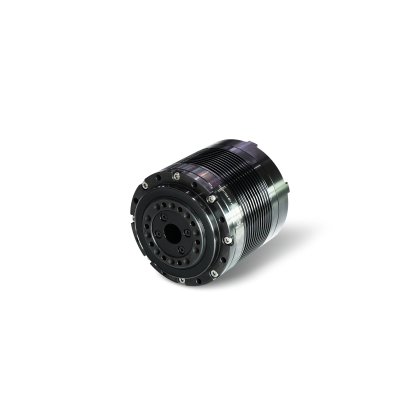
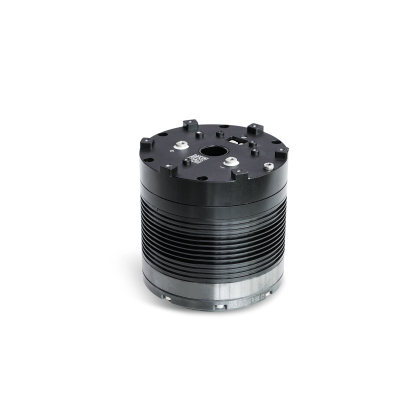
iFMH Series Rotary Joint Module
Aligned with the industry shift toward compact, fully integrated drive architectures, the iFMH humanoid rotary joint module combines frameless torque motor, precision gearbox, feedback sensors and drive electronics into a single precision assembly. This all-in-one joint unit removes the complexity of independent component matching for system developers, delivering a streamlined one-stop hardware solution to simplify high-density integrated robot system design.
Product Model
iFMH55H
Add comparison
Cancel comparison
iFMH60H
Add comparison
Cancel comparison
iFMH70H
Add comparison
Cancel comparison
iFMH80H
Add comparison
Cancel comparison
Slide to display more
Electrical Specifications
Fold up
Expand
Rated Voltage(VDC)
48
48
48
48
Gear Ratio
100:1
100:1
100:1
101:1
Peak Start-Stop Torque(N.m)
19
37
57
70
Rated Torque(N.m)
7.7
27
34
51
Maximum Momentary Torque(N.m)
35
71
95
143
Rated Speed(rpm)
37
35
31
35
Maximum No-Load Speed (rpm)
50
48
38
45
Rated Power(W)
29.8
99
110.4
186.9
Peak Torque Density(Nm/kg)
79
109
117
127
Input Voltage Range(VDC)
20~72
20~72
20~72
20~72
Encoder Type
Absolute Encoder
Absolute Encoder
Absolute Encoder
Absolute Encoder
Encoder Resolution
19-bit
19-bit
19-bit
19-bit
Dimensions(mm)
Φ55*70
Φ62*76
Φ70*76
Φ80*84
Hollow Bore Diameter(mm)
Φ8.4
Φ8.5
Φ12
Φ16
Weight(kg)
445
650
815
1130